Projects
S.I.Na.V. Project
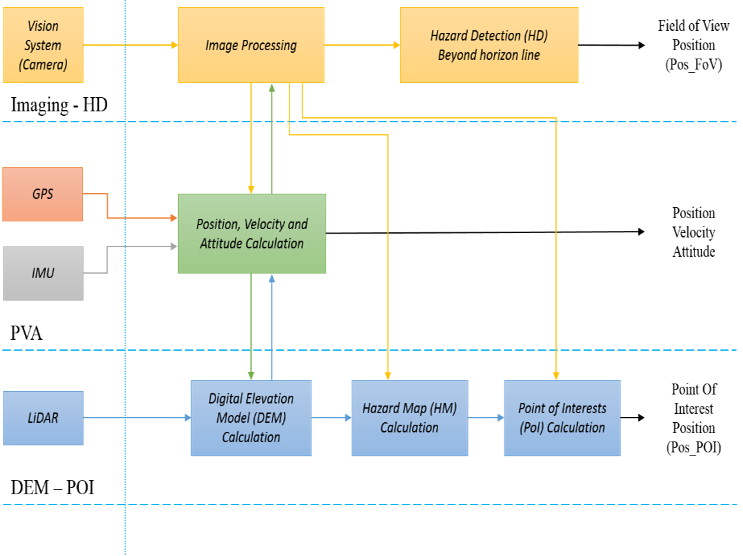
Antares has carried out the R&D of an autonomous navigation and remote control subsystem for an unmanned aerial vehicle (UAV), which employs an integration of various systems and sensors such as IMU, GPS, LiDAR, Vision System, and related algorithms, for autonomous navigation and detection of obstacles during the flight (hazard detection).